

Geoflex Technology
From GNSS to Geoflex’s correction service: how does it work?
How GNSS works?
GNSS receivers (i.e. the chipsets found in smartphones, cars, etc…) calculate their position by computing signals from a minimum of four satellites from the available GNSS constellations: GPS, Galileo, Glonass, Beidou.
The receiver uses the time difference between the broadcast time sent by the satellite and the time of signal reception to compute the distance, or range, from the satellite to the receiver.
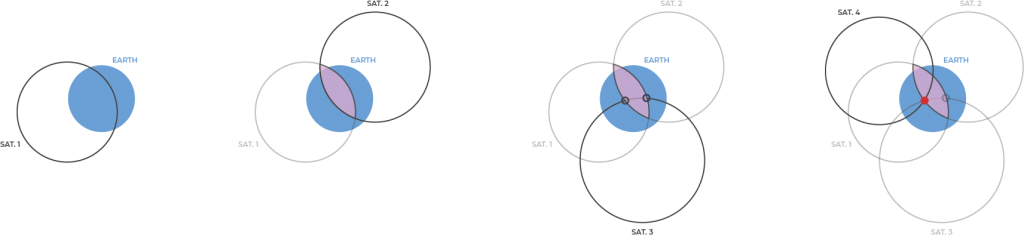
Once the signals from multiple satellites are received the GNSS device knows the position of each of them and its distance to them. With one satellite the potential position is any point on a sphere on which the radius is he said distance of the satellite, with multiple satellites the position is the intersection of these different spheres. The more satellites signals received (thanks to an unobstructed view of the sky), the more different spheres (satellites) intersecting, the better is the position.
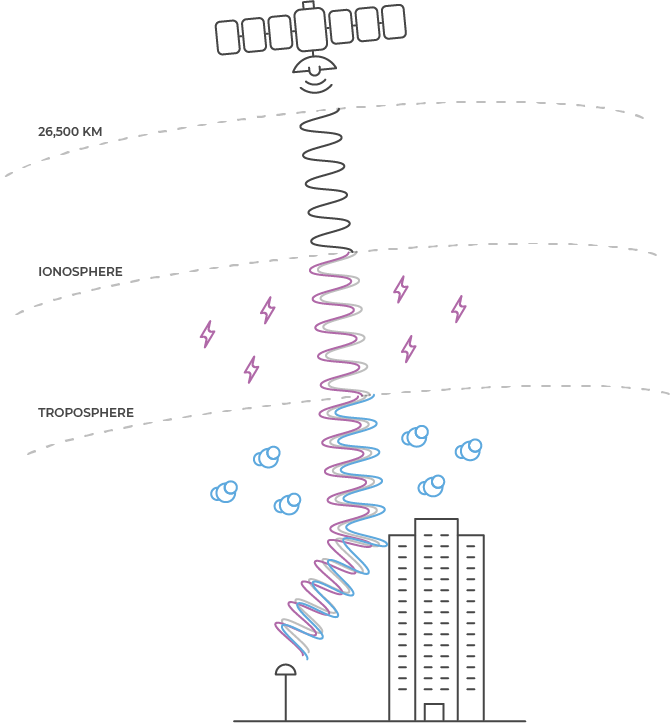
However, the accuracy of this position, even in receiving the signal of a significant number of satellites is never perfect. Many small errors at the satellite level (satellite orbits error, atomic clock errors, electronic biases) and at the receiver level (signal delay due to ionosphere refraction, signal multipath in urban canyons or under dense foliage, etc…), cannot be avoided by a standard GNSS receiver.
With satellites orbiting at 25,000 kilometers from Earth, tiny errors (for example a nanosecond difference in the clock) can result in significant error margins in calculating the distance to the satellite, hence the final estimated position of the GNSS device. As a result the accuracy of a standard GNSS receiver (as found in the average smartphone or car) is usually in the region of 3 to 10 meters (10 to 30 feet).
To mitigate these errors and to get GNSS positioning accuracy to the centimeter level, Geoflex has developed a high-performance correction service.
Geoflex’s technology: Precise Point Positioning (PPP)
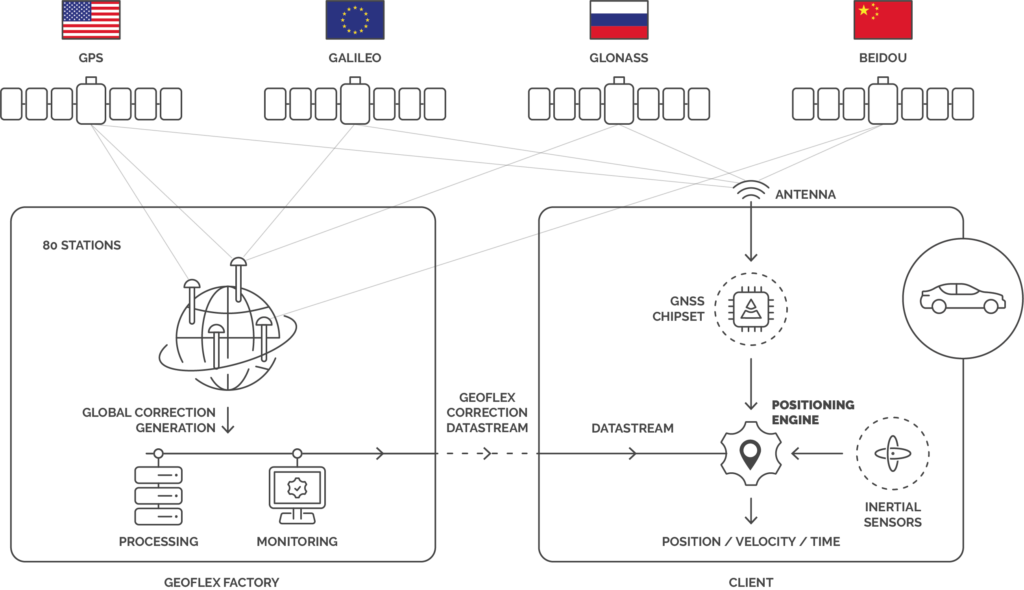
Geoflex operates a network of 80 GNSS ground stations – which positions are very precisely known – covering the entire globe and ensuring a full system redundancy. With this global presence each GNSS satellite orbiting around earth is seen by a minimum of 6 ground stations at every time.
Each station records and transmits in real-time its GNSS measurements to several processing centers (ones of them in Europe and in North America) which are computing in real-time the GNSS corrections for all the satellite-based errors: satellite orbits, satellite clocks, electronic biases.
These calculations are very sophisticated. As an example, one nanosecond error on a satellite atomic clock means a 30 cm range error between the satellite and the receiver. Another example is the extreme temperatures (80°C to -40°C) experienced by satellites for each orbit around earth (day light / night). These temperature changes create tiny differences in signal transmission: study shows that a 3-meter copper cable on a satellite can transmit data with 4 nano seconds difference between a cold and a hot phase, meaning a potential error of 1.2 meters in the calculated range.
These complex calculations have been modeled by French Space agency CNES in a 12 years long research, and have been protected by seven patents exclusively licensed to Geoflex.
Based on the computing in the processing centers, a correction stream (satellite dependent errors) is broadcast via internet to Geoflex’s end customers.
GNSS receivers getting the Geoflex service are processing in a positioning engine (customer-developed or provided by Geoflex) the raw signal data from the satellites against the correction data.
A first level of high accuracy is immediately obtained, while the positioning engine continues to raffinate its location using a statistical model based on the growing dataset received from the satellites. During this so-called “convergence“ phase (up to 30 minutes) the positioning engine estimates the local errors (iono- and tropo-spheric refractions, as well as clock error and electronic biases from the receiver) and improves step-by-step the accuracy down to 2 cm, 95% of time.
In addition to its GNSS correction service, Geoflex has developed sensor fusion software, embedded within its positioning engine, where a precise position is calculated in mixing limited satellite data (one or two satellites in view), correction data and ground-based sensors such as Lidar, odometer, gyroscope, accelerometer, etc. or a combination of these.